New project of adaptive and modular robotic systems for palletisation
INESC TEC, through the Centre for Robotics in Industry and Intelligent Systems (CRIIS) and the Centre for Enterprise Systems Engineering (CESE), promotes the AdaptPack project, together with the company JPM - Industrial Automation and INEGI (Institute of Science and Innovation in Mechanical and Industrial Engineering).
18th January 2018
The objective of this project is to research and develop a framework focused on the development of new robotic equipment for the packaging/palletising of products. This will enable the agile development of systems that, on the one hand, are fully adaptable to the handling of products with different formats, and, on the other hand, have a highly flexible modular architecture. These measures are intended to significantly reduce the design, construction and assembly times of new equipment.
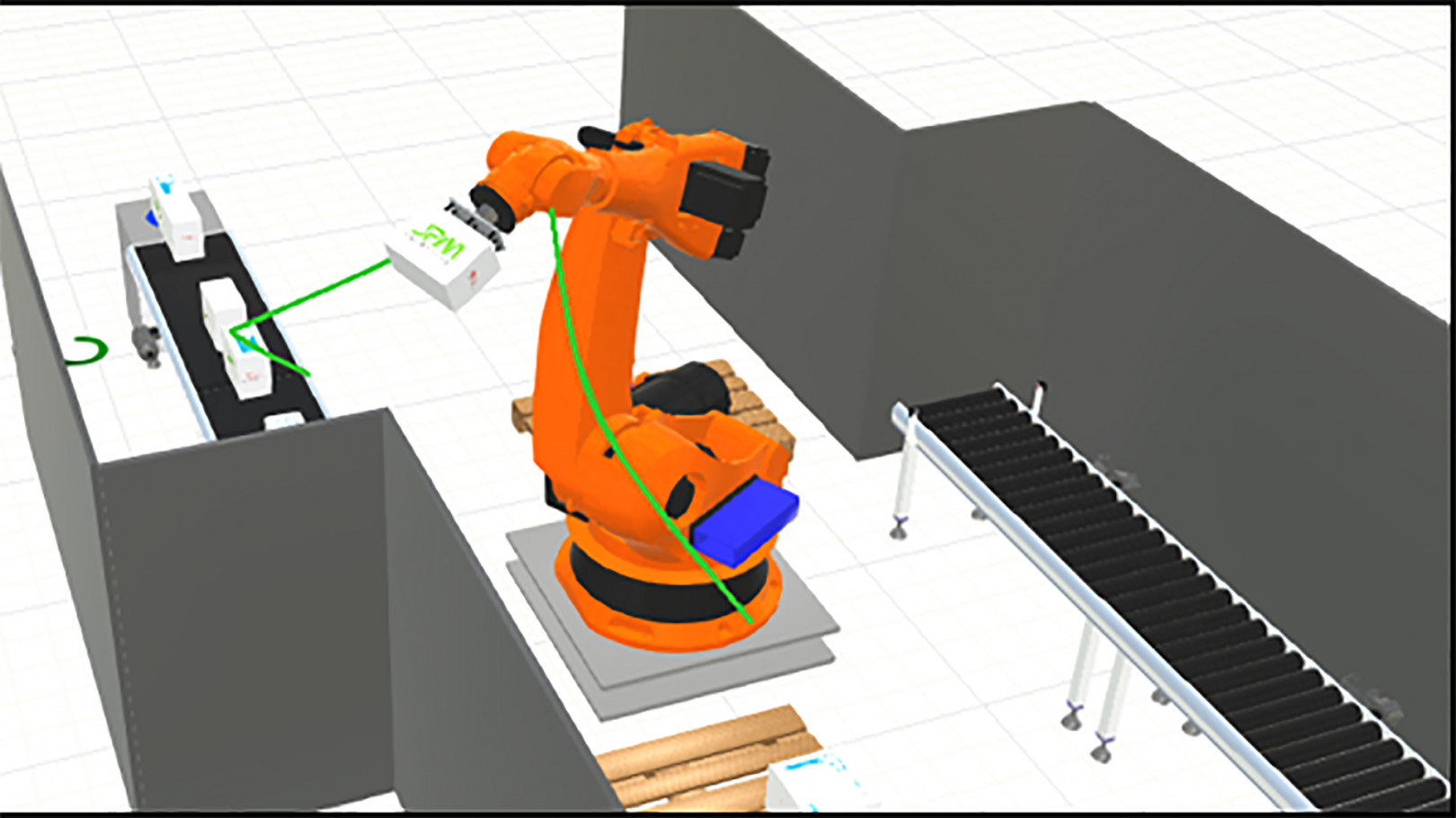
AdaptPack Studio is the name of the platform to be developed by INESC TEC. In a 3D simulation environment, this platform should be able to create palletising solutions, on which an industrial robot-programming accelerator runs, automatically generating the necessary trajectories for the robots to carry out the palletisation tasks with minimal intervention from the user.
In parallel, a model is also being developed that optimises the placement of packages on pallets, considering different product characteristics and the size, stability and safety of the pallet. To integrate these modules, an intelligent controller is being designed that allows a simple and easy interface with robots, avoiding errors or useless practices.
The project team is coordinated by Pedro Ribeiro, of CESE, with the collaboration of Manuel Silva, of CRIIS. Luís Costa and Miguel Cabral, of CESE, and Luís Rocha, Ricardo Silva, Pedro Relvas and Paulo Rebelo, of CRIIS, are also part of the team.
At the ROBOT'2017 - Third Iberian Robotics Conference, held from 22 to 24 November in Seville (Spain), some of the work already done was presented through the scientific article "Off-line Programming of Collision Free Trajectories for Palletizing Robots”.
The AdaptPack Project is funded by the European Regional Development Fund (ERDF) through the Operational Programme for Competitiveness and Internationalisation - COMPETE 2020, within the scope of the PORTUGAL 2020 Partnership Agreement and through the National Innovation Agency.
The researchers mentioned in the news article are associated with INESC TEC and ISEP-IPP.