Details
Name
Alfredo MartinsRole
Assistant ResearcherSince
01st March 2011
Nationality
PortugalCentre
Robotics and Autonomous SystemsContacts
+351228340554
alfredo.martins@inesctec.pt
2025
Authors
Loureiro, G; Dias, A; Almeida, J; Martins, A; Silva, E;
Publication
JOURNAL OF MARINE SCIENCE AND ENGINEERING
Abstract
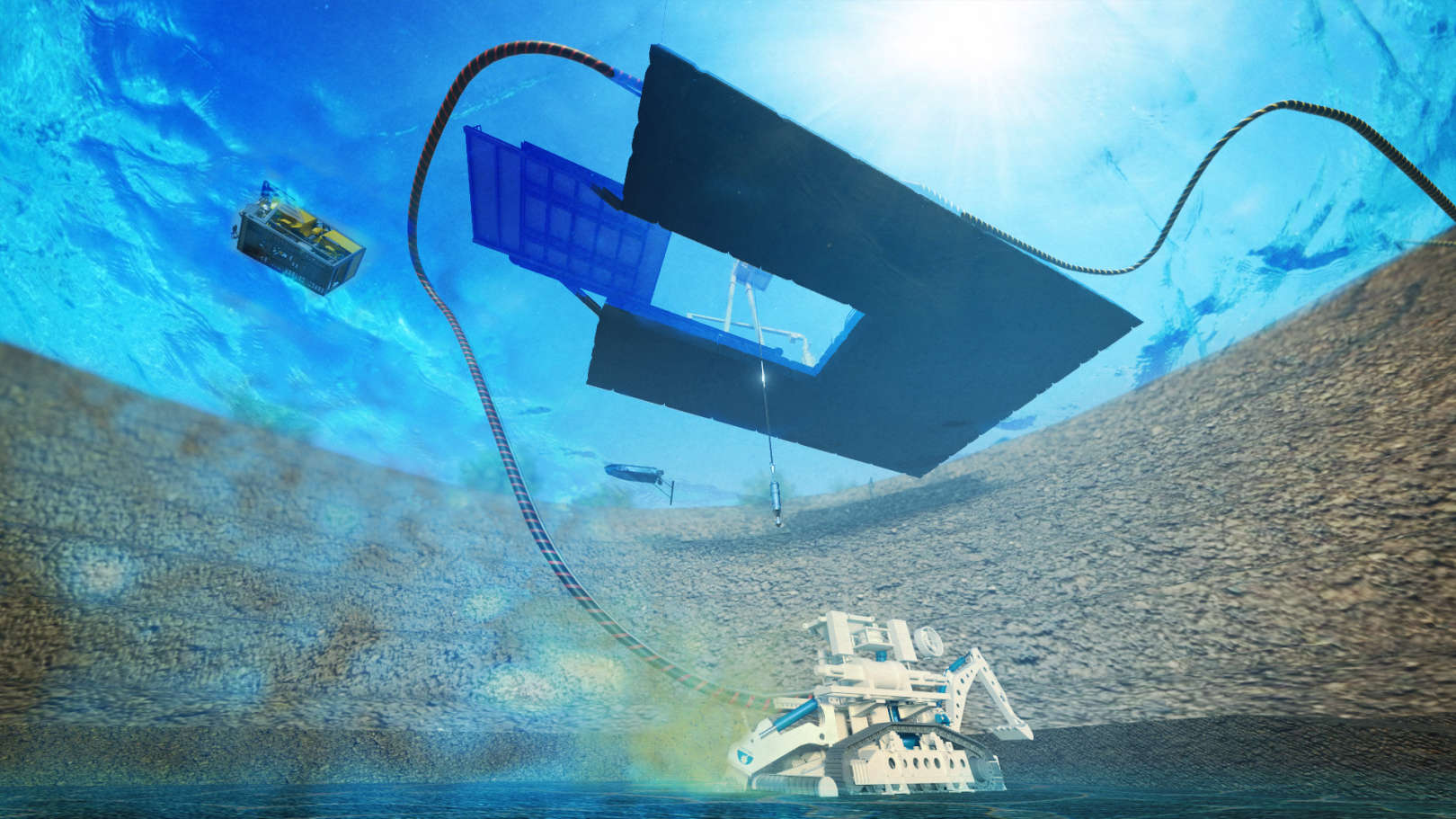
Climate change has led to the need to transition to clean technologies, which depend on an number of critical metals. These metals, such as nickel, lithium, and manganese, are essential for developing batteries. However, the scarcity of these elements and the risks of disruptions to their supply chain have increased interest in exploiting resources on the deep seabed, particularly polymetallic nodules. As the identification of these nodules must be efficient to minimize disturbance to the marine ecosystem, deep learning techniques have emerged as a potential solution. Traditional deep learning methods are based on the use of convolutional layers to extract features, while recent architectures, such as transformer-based architectures, use self-attention mechanisms to obtain global context. This paper evaluates the performance of representative models from both categories across three tasks: detection, object segmentation, and semantic segmentation. The initial results suggest that transformer-based methods perform better in most evaluation metrics, but at the cost of higher computational resources. Furthermore, recent versions of You Only Look Once (YOLO) have obtained competitive results in terms of mean average precision.
2024
Authors
Loureiro, G; Dias, A; Almeida, J; Martins, A; Hong, SP; Silva, E;
Publication
REMOTE SENSING
Abstract
The deep seabed is composed of heterogeneous ecosystems, containing diverse habitats for marine life. Consequently, understanding the geological and ecological characteristics of the seabed's features is a key step for many applications. The majority of approaches commonly use optical and acoustic sensors to address these tasks; however, each sensor has limitations associated with the underwater environment. This paper presents a survey of the main techniques and trends related to seabed characterization, highlighting approaches in three tasks: classification, detection, and segmentation. The bibliography is categorized into four approaches: statistics-based, classical machine learning, deep learning, and object-based image analysis. The differences between the techniques are presented, and the main challenges for deep sea research and potential directions of study are outlined.
2024
Authors
Dias, A; Mucha, A; Santos, T; Oliveira, A; Amaral, G; Ferreira, H; Martins, A; Almeida, J; Silva, E;
Publication
JOURNAL OF MARINE SCIENCE AND ENGINEERING
Abstract
This paper presents the implementation of an innovative solution based on heterogeneous autonomous vehicles to tackle maritime pollution (in particular, oil spills). This solution is based on native microbial consortia with bioremediation capacity, and the adaptation of air and surface autonomous vehicles for in situ release of autochthonous microorganisms (bioaugmentation) and nutrients (biostimulation). By doing so, these systems can be applied as the first line of the response to pollution incidents from several origins that may occur inside ports, around industrial and extraction facilities, or in the open sea during transport activities in a fast, efficient, and low-cost way. The paper describes the work done in the development of a team of autonomous vehicles able to carry as payload, native organisms to naturally degrade oil spills (avoiding the introduction of additional chemical or biological additives), and the development of a multi-robot framework for efficient oil spill mitigation. Field tests have been performed in Portugal and Spain's harbors, with a simulated oil spill, and the coordinate oil spill task between the autonomous surface vehicle (ASV) ROAZ and the unmanned aerial vehicle (UAV) STORK has been validated.
2024
Authors
Guedes, PA; Silva, H; Wang, S; Martins, A; Almeida, JM; Silva, E;
Publication
OCEANS 2024 - SINGAPORE
Abstract
This paper explores the potential use of acoustic imaging and the use of a multi-frequency multibeam-echosounder (MBES) for monitoring marine litter in the water column. The main goal is to perform a test and validation setup using a simulation and actual experimental setup to determine if the MBES data can detect marine litter in a water column image (WCI) and if using multi-frequency MBES data will allow to better distinguish and characterize marine litter debris in detection applications. Results using simulated HoloOcean Environment and actual marine litter data revealed the successful detection of objects commonly found in ocean litter hotspots at various ranges and frequencies, enablingthe pursue of novel means of automatic detection and classification in MBES WCI data while using multi-frequency capabilities.
2024
Authors
Oliveira, A; Dias, A; Santos, T; Rodrigues, P; Martins, A; Almeida, J;
Publication
DRONES
Abstract
The deployment of offshore wind turbines (WTs) has emerged as a pivotal strategy in the transition to renewable energy, offering significant potential for clean electricity generation. However, these structures' operation and maintenance (O&M) present unique challenges due to their remote locations and harsh marine environments. For these reasons, it is fundamental to promote the development of autonomous solutions to monitor the health condition of the construction parts, preventing structural damage and accidents. This paper explores the application of Unmanned Aerial Vehicles (UAVs) in the inspection and maintenance of offshore wind turbines, introducing a new strategy for autonomous wind turbine inspection and a simulation environment for testing and training autonomous inspection techniques under a more realistic offshore scenario. Instead of relying on visual information to detect the WT parts during the inspection, this method proposes a three-dimensional (3D) light detection and ranging (LiDAR) method that estimates the wind turbine pose (position, orientation, and blade configuration) and autonomously controls the UAV for a close inspection maneuver. The first tests were carried out mainly in a simulation framework, combining different WT poses, including different orientations, blade positions, and wind turbine movements, and finally, a mixed reality test, where a real vehicle performed a full inspection of a virtual wind turbine.
Supervised Thesis
2022
Author
PEDRO MIGUEL SERRÃO DA VEIGA MARTINS
Institution
IPP-ISEP
2021
Author
PEDRO NUNO DE QUEIRÓS SALCEDAS DE CARVALHO GERALDES
Institution
IPP-ISEP
2020
Author
JOÃO FILIPE AMORIM RESENDE
Institution
IPP-ISEP
2020
Author
RUI RODRIGO SERRA FIGUEIRINHA
Institution
IPP-ISEP
2020
Author
PEDRO EMANUEL JORGE BARBOSA
Institution
IPP-ISEP
The access to the final selection minute is only available to applicants.
Please check the confirmation e-mail of your application to obtain the access code.