Problem Addressed
Robotic subsea mapping, inspection and maintenance activities are impaired by water turbidity (e.g., marine snow). Current underwater imaging systems (e.g., 3D, optic) present serious limitations when operating in harsh underwater environments.
Nowadays, close rage navegation missions are impaired, because the distance determination and object reconstruction are not accurate or reliable, even using available solutions using active imaging to project a pattern of light. Therefore, the limited visual perception capability of autonomous underwater vehicles (AUVs) restricts the use of such vehicles to medium/long range missions.
Technology
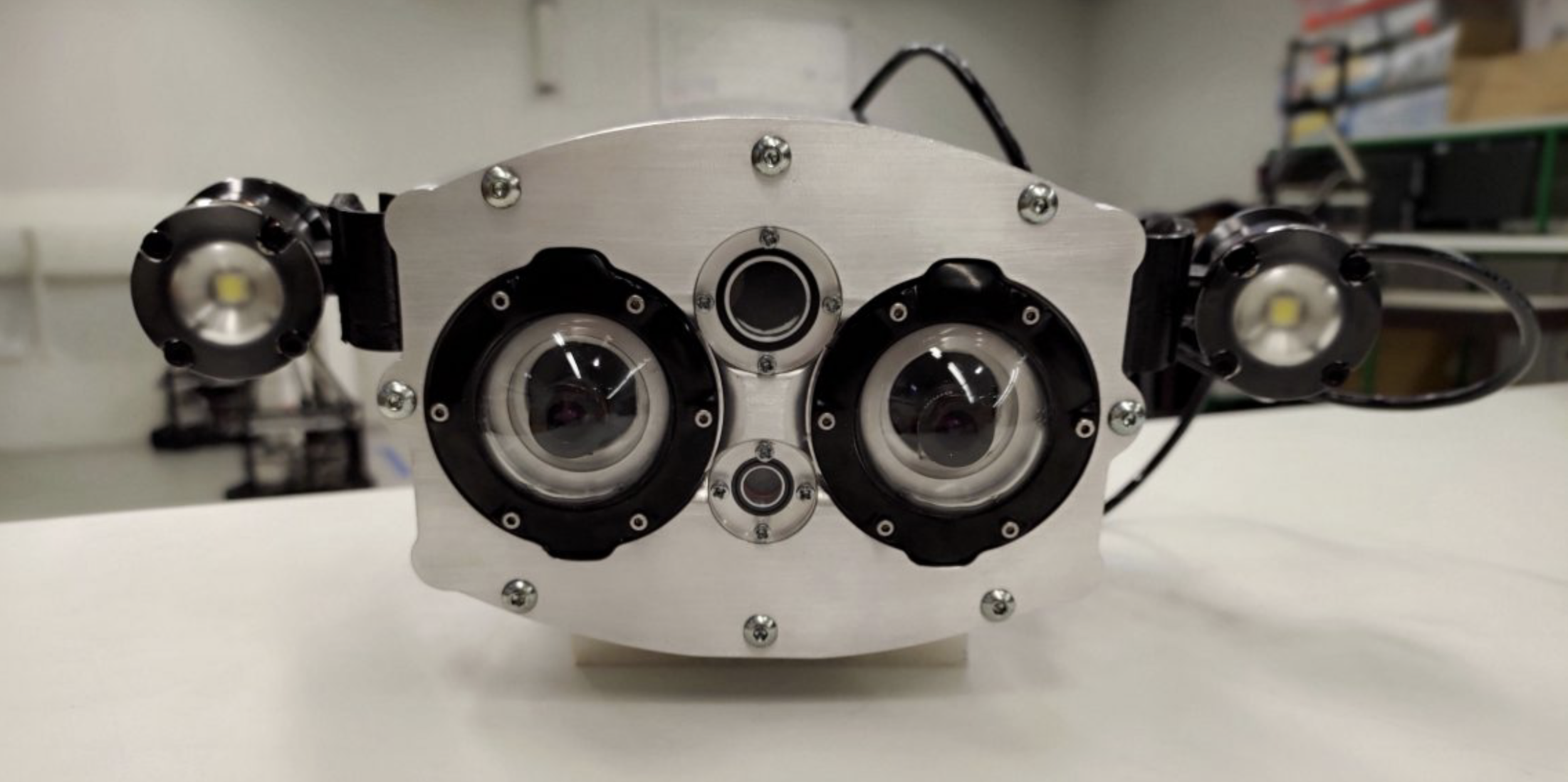
Our solution is MARESye an innovative hybrid visual imaging system that provides dense and accurate 3D information in harsh and turbid (marine snow) underwater environments. MARESye consists of a compact hardware and an innovative software, that combines information from imaging techniques, multiple light stripe range (LSR) and a photometric stereo (PS).
This system was designed to extend the measurement range and to produce high density 3D estimations in dynamic underwater environments, with a novel synchronisation method, using a gate timing computer-implemented method.
Advantages
Close range navigation of underwater vehicles – precise and accurate determination of the distance to the target objects due to its novel synchronisation method;
Supports underwater objects manipulation - given by an accurate, and high 3D imaging, even with marine snow;
Real time - access to data in real-time, particularly 3D data;
Faster maintenance and inspection operations – due to its precise volumetric measurements;
Plug-and-play - no need for extra layers of software;
Suitable to varied deployments and easy to install– it´s compact design fitting in small vehicles such as gliders or on the manipulator arm of AUVs and Remotely Operated Vehicles (ROVs);
Customizable – can be applied in different applications and tasks.
Possible Applications
- Subsea Maintenance/Construction Operations (Offshore Oil and Gas; Offshore Wind; Underwater Construction)
- Subsea Inspection Operations (Offshore Oil and Gas; Offshore Wind; Underwater Construction; other commercial underwater activities);
- Seabed mapping/environmental monitoring (Defence; Scientific Research/commercial survey).
-
Commercial Rights
INESC TEC and U.Porto have exclusive rights -
Development Stage
Industrial Prototype (TRL 5-6) -
Further Information
Intellectual Property Status
USA (Granted)
EUROPE (Pending)
AUSTRALIA (Granted)
Opportunity:
- Licensing
- Contract Research
- Product Development
- Industrial Partnership
Demo/Video
Scientific Publications
Awards & News
-
Industrial Categories
Sea -
Tags
Computer vision, Underwater, Close range navigation, Hybrid imaging system, Cooperative perception, Maintenance operations, 3D imaging