Details
Name
José Miguel AlmeidaRole
Centre CoordinatorSince
01st March 2011
Nationality
PortugalCentre
Robotics and Autonomous SystemsContacts
+351228340554
jose.m.almeida@inesctec.pt
2025
Authors
Loureiro, G; Dias, A; Almeida, J; Martins, A; Silva, E;
Publication
JOURNAL OF MARINE SCIENCE AND ENGINEERING
Abstract
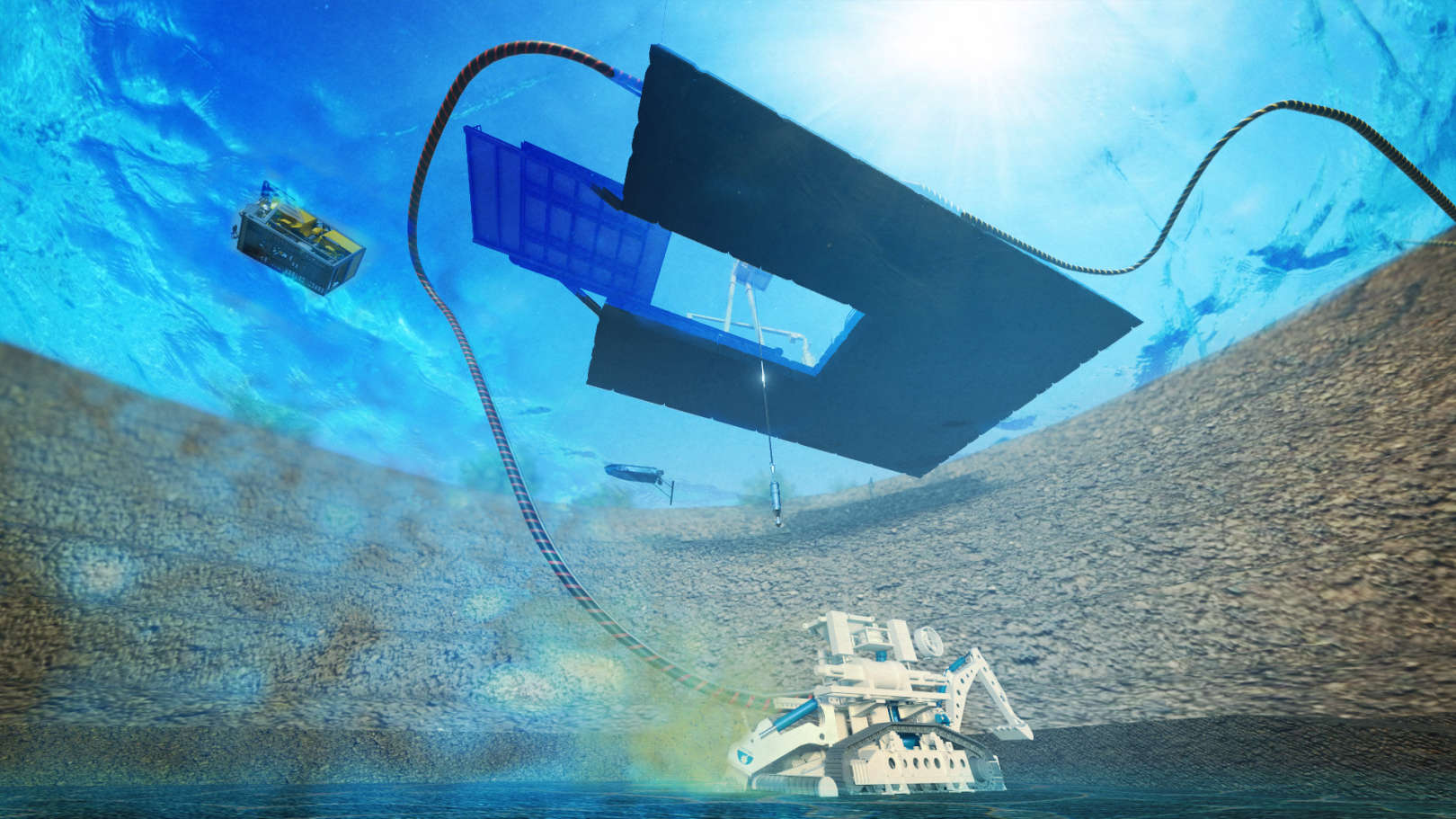
Climate change has led to the need to transition to clean technologies, which depend on an number of critical metals. These metals, such as nickel, lithium, and manganese, are essential for developing batteries. However, the scarcity of these elements and the risks of disruptions to their supply chain have increased interest in exploiting resources on the deep seabed, particularly polymetallic nodules. As the identification of these nodules must be efficient to minimize disturbance to the marine ecosystem, deep learning techniques have emerged as a potential solution. Traditional deep learning methods are based on the use of convolutional layers to extract features, while recent architectures, such as transformer-based architectures, use self-attention mechanisms to obtain global context. This paper evaluates the performance of representative models from both categories across three tasks: detection, object segmentation, and semantic segmentation. The initial results suggest that transformer-based methods perform better in most evaluation metrics, but at the cost of higher computational resources. Furthermore, recent versions of You Only Look Once (YOLO) have obtained competitive results in terms of mean average precision.
2025
Authors
Ferreira, A; Almeida, J; Matos, A; Silva, E;
Publication
ROBOTICS
Abstract
Due to space and energy restrictions, lightweight autonomous underwater vehicles (AUVs) are usually fitted with low-power processing units, which limits the ability to run demanding applications in real time during the mission. However, several robotic perception tasks reveal a parallel nature, where the same processing routine is applied for multiple independent inputs. In such cases, leveraging parallel execution by offloading tasks to a GPU can greatly enhance processing speed. This article presents a collection of generic matrix manipulation kernels, which can be combined to develop parallelized perception applications. Taking advantage of those building blocks, we report a parallel implementation for the 3DupIC algorithm-a probabilistic scan matching method for sonar scan registration. Tests demonstrate the algorithm's real-time performance, enabling 3D sonar scan matching to be executed in real time onboard the EVA AUV.
2024
Authors
Loureiro, G; Dias, A; Almeida, J; Martins, A; Hong, SP; Silva, E;
Publication
REMOTE SENSING
Abstract
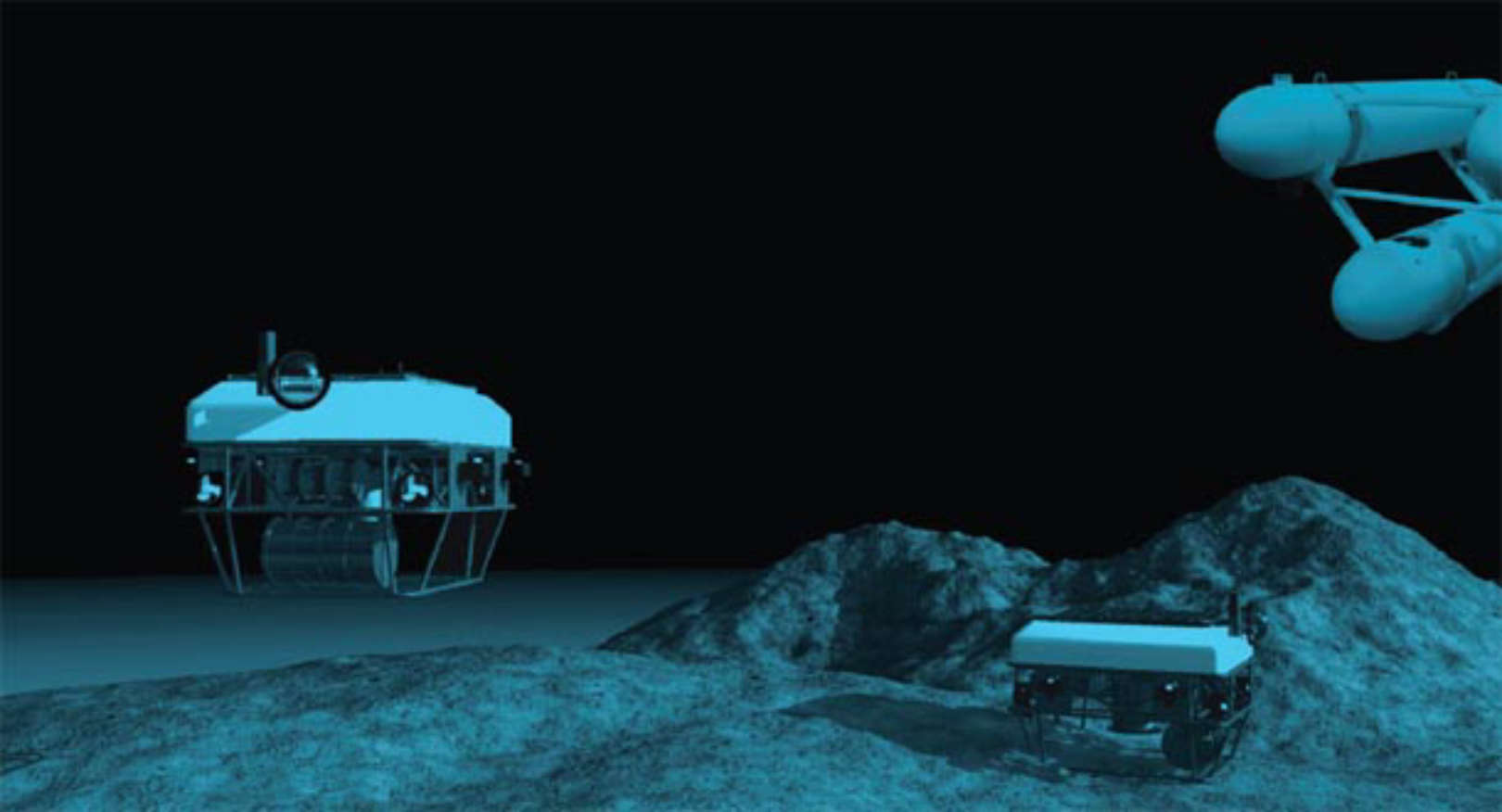
The deep seabed is composed of heterogeneous ecosystems, containing diverse habitats for marine life. Consequently, understanding the geological and ecological characteristics of the seabed's features is a key step for many applications. The majority of approaches commonly use optical and acoustic sensors to address these tasks; however, each sensor has limitations associated with the underwater environment. This paper presents a survey of the main techniques and trends related to seabed characterization, highlighting approaches in three tasks: classification, detection, and segmentation. The bibliography is categorized into four approaches: statistics-based, classical machine learning, deep learning, and object-based image analysis. The differences between the techniques are presented, and the main challenges for deep sea research and potential directions of study are outlined.
2024
Authors
Dias, A; Mucha, A; Santos, T; Oliveira, A; Amaral, G; Ferreira, H; Martins, A; Almeida, J; Silva, E;
Publication
JOURNAL OF MARINE SCIENCE AND ENGINEERING
Abstract
This paper presents the implementation of an innovative solution based on heterogeneous autonomous vehicles to tackle maritime pollution (in particular, oil spills). This solution is based on native microbial consortia with bioremediation capacity, and the adaptation of air and surface autonomous vehicles for in situ release of autochthonous microorganisms (bioaugmentation) and nutrients (biostimulation). By doing so, these systems can be applied as the first line of the response to pollution incidents from several origins that may occur inside ports, around industrial and extraction facilities, or in the open sea during transport activities in a fast, efficient, and low-cost way. The paper describes the work done in the development of a team of autonomous vehicles able to carry as payload, native organisms to naturally degrade oil spills (avoiding the introduction of additional chemical or biological additives), and the development of a multi-robot framework for efficient oil spill mitigation. Field tests have been performed in Portugal and Spain's harbors, with a simulated oil spill, and the coordinate oil spill task between the autonomous surface vehicle (ASV) ROAZ and the unmanned aerial vehicle (UAV) STORK has been validated.
2024
Authors
Minhoto, V; Santos, T; Silva, LTE; Rodrigues, P; Arrais, A; Amaral, A; Dias, A; Almeida, J; Cunha, JPS;
Publication
ROBOT 2023: SIXTH IBERIAN ROBOTICS CONFERENCE, VOL 2
Abstract
Over the last few years, Man-Machine collaborative systems have been increasingly present in daily routines. In these systems, one operator usually controls the machine through explicit commands and assesses the information through a graphical user interface. Direct & implicit interaction between the machine and the user does not exist. This work presents a man-machine symbiotic concept & system where such implicit interaction is possible targeting search and rescue scenarios. Based on measuring physiological variables (e.g. body movement or electrocardiogram) through wearable devices, this system is capable of computing the psycho-physiological state of the human and autonomously identify abnormal situations (e.g. fall or stress). This information is injected into the control loop of the machine that can alter its behavior according to it, enabling an implicit man-machine communication mechanism. A proof of concept of this system was tested at the ARTEX (ARmy Technological EXperimentation) exercise organized by the Portuguese Army involving a military agent and a drone. During this event the soldier was equipped with a kit of wearables that could monitor several physiological variables and automatically detect a fall during a mission. This information was continuously sent to the drone that successfully identified this abnormal situation triggering the take-off and a situation awareness fly-by flight pattern, delivering a first-aid kit to the soldier in case he did not recover after a pre-determined time period. The results were very positive, proving the possibility and feasibility of a symbiotic system between humans and machines.
Supervised Thesis
2018
Author
EDUARDO JOSÉ PINTO SOARES
Institution
IPP-ISEP
2018
Author
CAIO TEIXEIRA LOMBA
Institution
IPP-ISEP
2018
Author
ANDRÉ FILIPE MARTINS FERREIRA
Institution
IPP-ISEP
2018
Author
FÁBIO ANDRÉ COSTA AZEVEDO
Institution
IPP-ISEP
2017
Author
MACIEJ CEREKWICKI
Institution
IPP-ISEP
The access to the final selection minute is only available to applicants.
Please check the confirmation e-mail of your application to obtain the access code.