Detalhes
Nome
Carlos AlmeidaCargo
Investigador SéniorDesde
01 julho 2013
Nacionalidade
PortugalCentro
Centro de Robótica e Sistemas AutónomosContactos
+351228340554
carlos.almeida@inesctec.pt
2024
Autores
Almeida, J; Soares, E; Almeida, C; Matias, B; Pereira, R; Sytnyk, D; Silva, P; Ferreira, A; Machado, D; Martins, P; Martins, A;
Publicação
OCEANS 2024 - SINGAPORE
Abstract
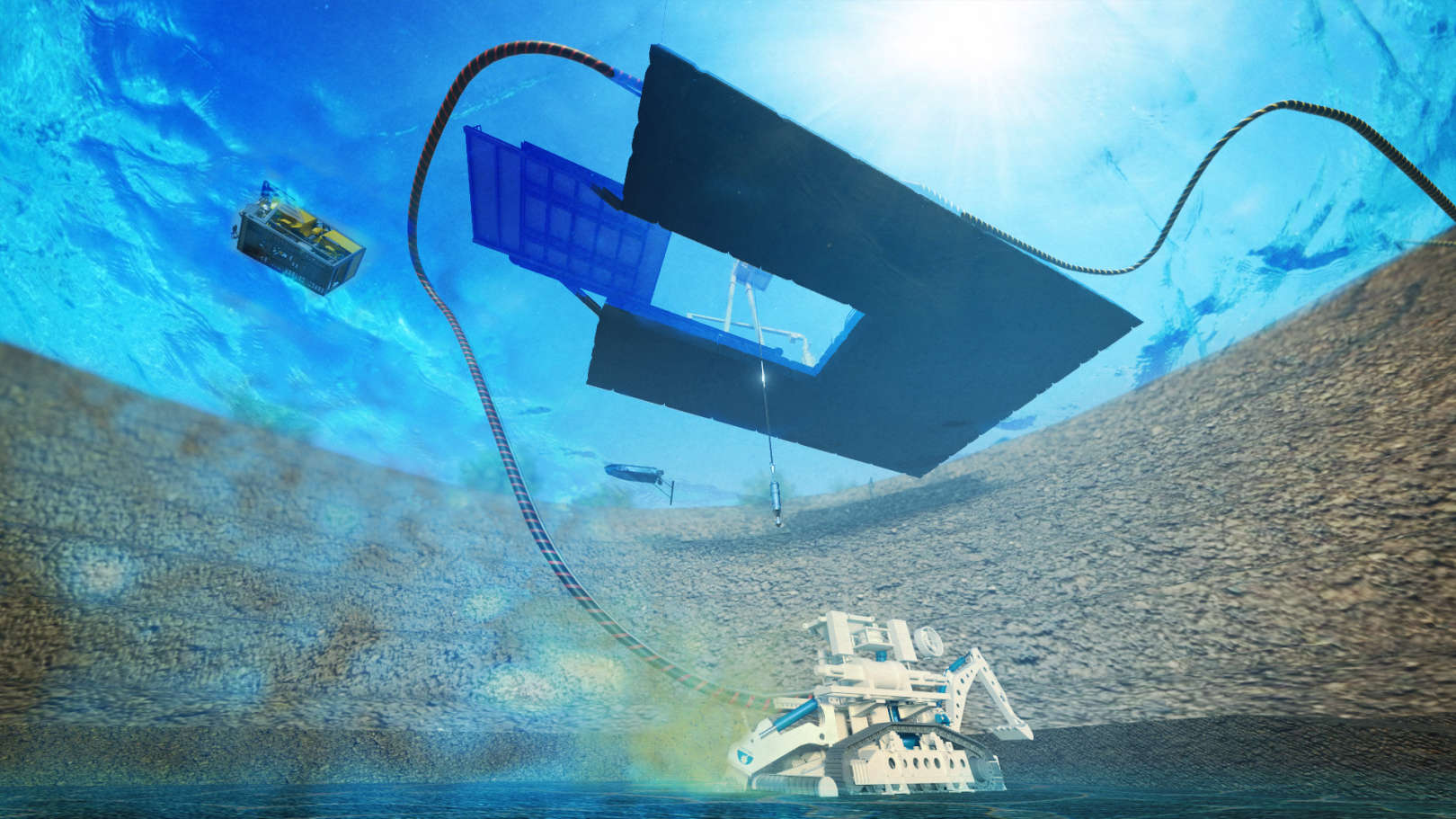
This paper addresses the problem of high-bandwidth communication and data recovery from deep-sea semi-permanent robotic landers. These vehicles are suitable for long-term monitoring of underwater activities and to support the operation of other robotic assets in Operation & Maintenance (O&M) of offshore renewables. Limitations of current communication solutions underwater deny the immediate transmission of the collected data to the surface, which is alternatively stored locally inside each lander. Therefore, data recovery often implies the interruption of the designated tasks so that the vehicle can return to the surface and transmit the collected data. Resorting to a short-range and high-bandwidth optical link, an alternative underwater strategy for flexible data exchange is presented. It involves the usage of an AUV satellite approaching each underwater node until an optical communication channel is established. At this point, high-bandwidth communication with the remote lander becomes available, offering the possibility to perform a variety of operations, including the download of previously recorded information, the visualisation of video streams from the lander on-board cameras, or even performing remote motion control of the lander. All these three operations were tested and validated with the experimental setup reported here. The experiments were performed in the Atlantic Ocean, at Setubal underwater canyon, reaching the operation depth of 350m meters. Two autonomous robotic platforms were used in the experiments, namely the TURTLE3 lander and the EVA Hybrid Autonomous Underwater Vehicle. Since EVA kept a tether fibre optic connection to the Mar Profundo support vessel, it was possible to establish a full communication chain between a landbased control centre and the remote underwater nodes.
2023
Autores
Barbosa, S; Dias, N; Almeida, C; Silva, G; Ferreira, A; Camilo, A; Silva, E;
Publicação
JOURNAL OF GEOPHYSICAL RESEARCH-ATMOSPHERES
Abstract
Gamma radiation over the Atlantic Ocean was measured continuously from January to May 2020 by a NaI(Tl) detector installed on board the Portuguese navy's ship NRP Sagres. Enhancements in the gamma radiation values are identified automatically by an algorithm for detection of anomalies in mean and variance as well as by visual inspection. The anomalies are typically +50% above the background level and relatively rare events (similar to<10% of the days). All the detected anomalies are associated with simultaneous precipitation events, consistent with the wet deposition of scavenged radionuclides. The enhancements are detected in the open ocean even at large distances (+500 km) from the nearest coastline. Back trajectories reveal that half of these events are associated with air masses experiencing continental land influences, but the other half do not display evidence of recent land contact. The enhancements in gamma radiation very far from land and with no evidence of continental fetch from back trajectories are difficult to explain as resulting only from radionuclides with a terrestrial source such as radon and its progeny. Further investigation and additional measurements are needed to improve understanding on the sources of ambient radioactivity in the open ocean and assess whether gamma radiation in the marine environment is influenced not only by radionuclides of terrestrial origin, but also cosmogenic radionuclides, like Beryllium-7, formed in the upper atmosphere but with the ability to be transported downward and serve as a tracer of the aerosols to which it attaches. Plain Language Summary Radioactive elements such as the noble gas radon and those produced by its radioactive decay are naturally present in the environment and used as tracers of atmospheric transport and composition. In particular, the noble gas radon, being inert and of predominantly terrestrial origin, is used to identify pristine marine air masses with no land contamination. Precipitation over land typically brings radon from the atmosphere to the surface, enhancing gamma radiation on the ground, but such enhancements have not been identified before nor expected over the ocean due to the low amount of radon typical of marine air masses. Here we report, for the first time, gamma radiation enhancements associated with precipitation in the oceanic environment, using measurements performed over the Atlantic Ocean in a campaign onboard the Portuguese navy ship NRP Sagres.
2023
Autores
Dias, N; Amaral, G; Almeida, C; Ferreira, A; Camilo, A; Silva, E; Barbosa, S;
Publicação
Abstract
2023
Autores
Monica, P; Cruz, N; Almeida, JM; Silva, A; Silva, E; Pinho, C; Almeida, C; Viegas, D; Pessoa, LM; Lima, AP; Martins, A; Zabel, F; Ferreira, BM; Dias, I; Campos, R; Araujo, J; Coelho, LC; Jorge, PS; Mendes, J;
Publicação
OCEANS 2023 - LIMERICK
Abstract
One way to mitigate the high costs of doing science or business at sea is to create technological infrastructures possessing all the skills and resources needed for successful maritime operations, and make those capabilities and skills available to the external entities requiring them. By doing so, the individual economic and scientific agents can be spared the enormous effort of creating and maintaining their own, particular set of equivalent capabilities, thus drastically lowering their initial operating costs. In addition to cost savings, operating based on fully-fledged, shared infrastructures not only allows the use of more advanced scientific equipment and highly skilled personnel, but it also enables the business teams (be it industry or research) to focus on their goals, rather than on equipment, logistics, and support. This paper will describe the TEC4SEA infrastructure, created precisely to operate as described. This infrastructure has been under implementation in the last few years, and has now entered its operational phase. This paper will describe it, present its current portfolio of services, and discuss the most relevant assets and facilities that have been recently acquired, so that the research and industrial communities requiring the use of such assets can fully evaluate their adequacy for their own purposes and projects.
2023
Autores
Martins, A; Almeida, J; Almeida, C; Matias, B; Ferreira, A; Machado, D; Ferreira, H; Pereira, R; Soares, E; Peixoto, PA; Silva, E;
Publicação
OCEANS 2023 - LIMERICK
Abstract
This paper presents the TURTLE hybrid robotic lander in the context of the field trials performed in the REP(MUS) 2022 military exercise. The TURTLE robot combines the characteristics and mobility of an autonomous underwater vehicle with the ones of a seabed lander, having been designed for extended permanence on the sea bottom and efficient ascending and dive to the deep sea. The REP( MUS) 2022 exercises organized by the Portuguese navy in collaboration with NATO organizations and other institutions demonstrated the large-scale use of unmanned marine systems in an operational scenario. The robotic system is presented as well as some of the results and experience from the field trials.
The access to the final selection minute is only available to applicants.
Please check the confirmation e-mail of your application to obtain the access code.