Detalhes
Nome
Carlos Miguel CostaCargo
InvestigadorDesde
10 fevereiro 2014
Nacionalidade
PortugalCentro
Centro de Robótica Industrial e Sistemas InteligentesContactos
+351220413317
carlos.m.costa@inesctec.pt
2027
Autores
Joana Santos; Mariana Ferraz; Ana Pinto; Luis F. Rocha; Carlos M. Costa; Ana C. Simões; Klass Bombeke; M.A.P. Vaz;
Publicação
International Symposium on Occupational Safety and Hygiene: Proceedings Book of the SHO2023
Abstract
2024
Autores
Costa, CM; Dias, J; Nascimento, R; Rocha, C; Veiga, G; Sousa, A; Thomas, U; Rocha, L;
Publicação
FLEXIBLE AUTOMATION AND INTELLIGENT MANUFACTURING: ESTABLISHING BRIDGES FOR MORE SUSTAINABLE MANUFACTURING SYSTEMS, FAIM 2023, VOL 1
Abstract
Reliable operation of production lines without unscheduled disruptions is of paramount importance for ensuring the proper operation of automated working cells involving robotic systems. This article addresses the issue of preventing disruptions to an automotive production line that can arise from incorrect placement of aluminum car parts by a human operator in a feeding container with 4 indexing pins for each part. The detection of the misplaced parts is critical for avoiding collisions between the containers and a high pressure washing machine and also to avoid collisions between the parts and a robotic arm that is feeding parts to a air leakage inspection machine. The proposed inspection system relies on a 3D sensor for scanning the parts inside a container and then estimates the 6 DoF pose of the container followed by an analysis of the overlap percentage between each part reference point cloud and the 3D sensor data. When the overlap percentage is below a given threshold, the part is considered as misplaced and the operator is alerted to fix the part placement in the container. The deployment of the inspection system on an automotive production line for 22 weeks has shown promising results by avoiding 18 hours of disruptions, since it detected 407 containers having misplaced parts in 4524 inspections, from which 12 were false negatives, while no false positives were reported, which allowed the elimination of disruptions to the production line at the cost of manual reinspection of 0.27% of false negative containers by the operator.
2023
Autores
Cordeiro, A; Rocha, LF; Costa, C; Silva, MF;
Publicação
ROBOT2022: FIFTH IBERIAN ROBOTICS CONFERENCE: ADVANCES IN ROBOTICS, VOL 2
Abstract
Bin picking based on deep learning techniques is a promising approach that can solve several analytical methods problems. These systems can provide accurate solutions to bin picking in cluttered environments, where the scenario is always changing. This article proposes a robust and accurate system for segmenting bin picking objects, employing an easy configuration procedure to adjust the framework according to a specific object. The framework is implemented in Robot Operating System (ROS) and is divided into a detection and segmentation system. The detection system employs Mask R-CNN instance neural network to identify several objects from two dimensions (2D) grayscale images. The segmentation system relies on the point cloud library (PCL), manipulating 3D point cloud data according to the detection results to select particular points of the original point cloud, generating a partial point cloud result. Furthermore, to complete the bin picking system a pose estimation approach based on matching algorithms is employed, such as Iterative Closest Point (ICP). The system was evaluated for two types of objects, knee tube, and triangular wall support, in cluttered environments. It displayed an average precision of 79% for both models, an average recall of 92%, and an average IOU of 89%. As exhibited throughout the article, this system demonstrates high accuracy in cluttered environments with several occlusions for different types of objects.
2023
Autores
Cordeiro, A; Souza, JP; Costa, CM; Filipe, V; Rocha, LF; Silva, MF;
Publicação
ROBOTICS
Abstract
Bin picking is a challenging task involving many research domains within the perception and grasping fields, for which there are no perfect and reliable solutions available that are applicable to a wide range of unstructured and cluttered environments present in industrial factories and logistics centers. This paper contributes with research on the topic of object segmentation in cluttered scenarios, independent of previous object shape knowledge, for textured and textureless objects. In addition, it addresses the demand for extended datasets in deep learning tasks with realistic data. We propose a solution using a Mask R-CNN for 2D object segmentation, trained with real data acquired from a RGB-D sensor and synthetic data generated in Blender, combined with 3D point-cloud segmentation to extract a segmented point cloud belonging to a single object from the bin. Next, it is employed a re-configurable pipeline for 6-DoF object pose estimation, followed by a grasp planner to select a feasible grasp pose. The experimental results show that the object segmentation approach is efficient and accurate in cluttered scenarios with several occlusions. The neural network model was trained with both real and simulated data, enhancing the success rate from the previous classical segmentation, displaying an overall grasping success rate of 87.5%.
2023
Autores
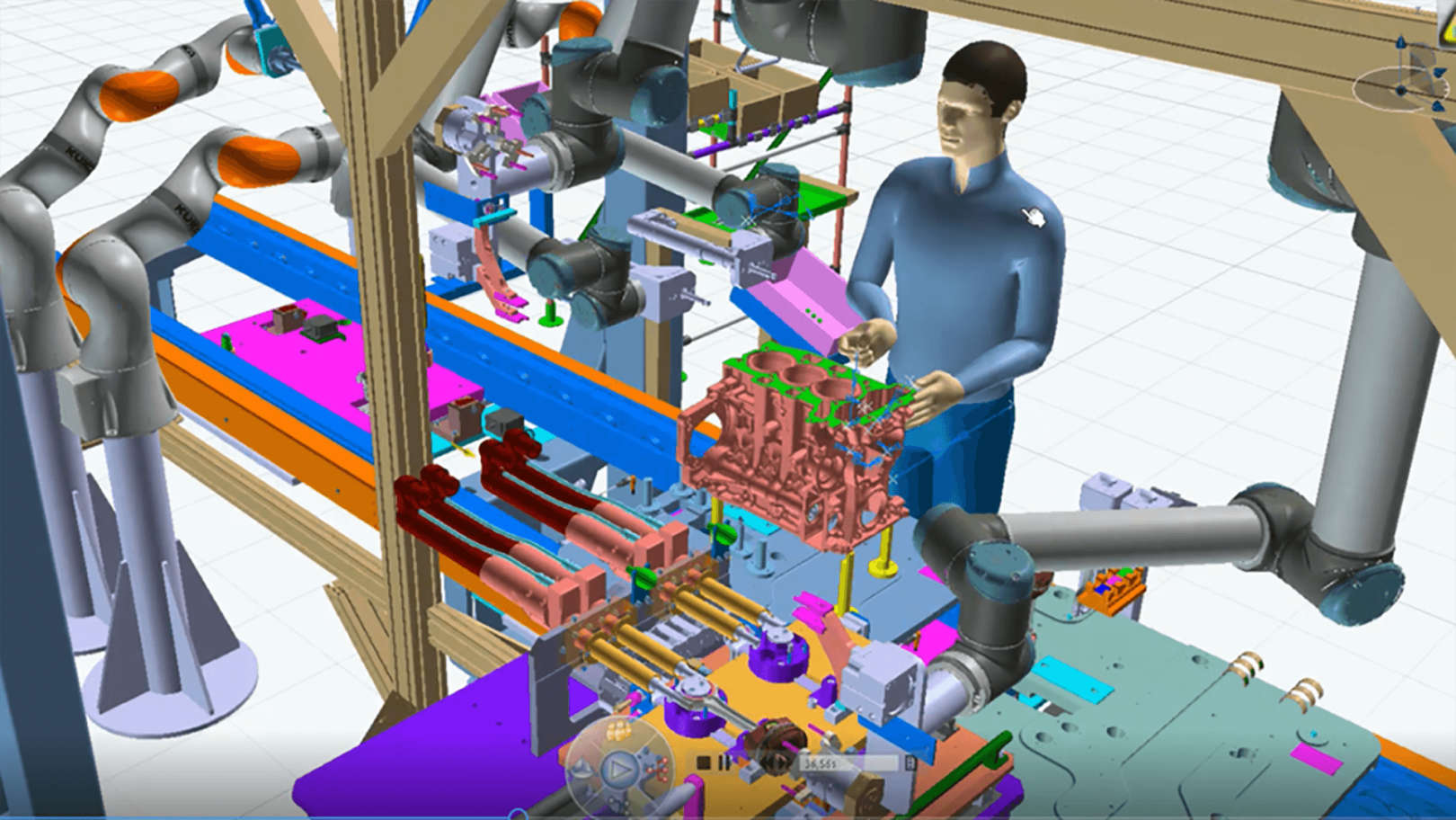
Moutinho, D; Rocha, LF; Costa, CM; Teixeira, LF; Veiga, G;
Publicação
ROBOTICS AND COMPUTER-INTEGRATED MANUFACTURING
Abstract
Human-Robot Collaboration is a critical component of Industry 4.0, contributing to a transition towards more flexible production systems that are quickly adjustable to changing production requirements. This paper aims to increase the natural collaboration level of a robotic engine assembly station by proposing a cognitive system powered by computer vision and deep learning to interpret implicit communication cues of the operator. The proposed system, which is based on a residual convolutional neural network with 34 layers and a long -short term memory recurrent neural network (ResNet-34 + LSTM), obtains assembly context through action recognition of the tasks performed by the operator. The assembly context was then integrated in a collaborative assembly plan capable of autonomously commanding the robot tasks. The proposed model showed a great performance, achieving an accuracy of 96.65% and a temporal mean intersection over union (mIoU) of 94.11% for the action recognition of the considered assembly. Moreover, a task-oriented evaluation showed that the proposed cognitive system was able to leverage the performed human action recognition to command the adequate robot actions with near-perfect accuracy. As such, the proposed system was considered as successful at increasing the natural collaboration level of the considered assembly station.
The access to the final selection minute is only available to applicants.
Please check the confirmation e-mail of your application to obtain the access code.