Detalhes
Nome
Diana ViegasCargo
Investigador SéniorDesde
01 maio 2004
Nacionalidade
PortugalCentro
Centro de Robótica e Sistemas AutónomosContactos
+351228340554
diana.viegas@inesctec.pt
2023
Autores
Monica, P; Cruz, N; Almeida, JM; Silva, A; Silva, E; Pinho, C; Almeida, C; Viegas, D; Pessoa, LM; Lima, AP; Martins, A; Zabel, F; Ferreira, BM; Dias, I; Campos, R; Araujo, J; Coelho, LC; Jorge, PS; Mendes, J;
Publicação
OCEANS 2023 - LIMERICK
Abstract
One way to mitigate the high costs of doing science or business at sea is to create technological infrastructures possessing all the skills and resources needed for successful maritime operations, and make those capabilities and skills available to the external entities requiring them. By doing so, the individual economic and scientific agents can be spared the enormous effort of creating and maintaining their own, particular set of equivalent capabilities, thus drastically lowering their initial operating costs. In addition to cost savings, operating based on fully-fledged, shared infrastructures not only allows the use of more advanced scientific equipment and highly skilled personnel, but it also enables the business teams (be it industry or research) to focus on their goals, rather than on equipment, logistics, and support. This paper will describe the TEC4SEA infrastructure, created precisely to operate as described. This infrastructure has been under implementation in the last few years, and has now entered its operational phase. This paper will describe it, present its current portfolio of services, and discuss the most relevant assets and facilities that have been recently acquired, so that the research and industrial communities requiring the use of such assets can fully evaluate their adequacy for their own purposes and projects.
2022
Autores
Teixeira, B; Lima, AP; Pinho, C; Viegas, D; Dias, N; Silva, H; Almeida, J;
Publicação
2022 OCEANS HAMPTON ROADS
Abstract
The Feedfirst Intelligent Monitoring System is a novel tool for intelligent monitoring of fish nurseries in aquaculture scenarios, mainly focusing on monitoring three essential items: water quality control, biomass estimation, and automated feeding. The system is based on machine vision techniques for fish larvae population size detection, and larvae biomass estimation is monitored through size measurement. We also show that the perception-actuation loop in automated fish tanks can be closed by using the vision system output to influence feeding procedures. The proposed solution was tested in a real tank in an aquaculture setting with real-time performance and logging capabilities.
2021
Autores
Freitas, S; Silva, H; Almeida, C; Viegas, D; Amaral, A; Santos, T; Dias, A; Jorge, PAS; Pham, CK; Moutinho, J; Silva, E;
Publicação
OCEANS 2021: SAN DIEGO - PORTO
Abstract
This work addresses the use of hyperspectral imaging systems for remote detection of marine litter concentrations in oceanic environments. The work consisted on mounting an off-the-shelf hyperspectral imaging system (400-2500 nm) in two aerial platforms: manned and unmanned, and performing data acquisition to develop AI methods capable of detecting marine litter concentrations at the water surface. We performed the campaigns at Porto Pim Bay, Fail Island, Azores, resorting to artificial targets built using marine litter samples. During this work, we also developed a Convolutional Neural Network (CNN-3D), using spatial and spectral information to evaluate deep learning methods to detect marine litter in an automated manner. Results show over 84% overall accuracy (OA) in the detection and classification of the different types of marine litter samples present in the artificial targets.
2021
Autores
Viegas, D; Figueiredo, A; Coimbra, J; Dos Santos, A; Almeida, J; Dias, N; Lima, L; Silva, H; Ferreira, H; Almeida, C; Amaro, T; Arenas, F; Castro, F; Santos, M; Martins, A; Silva, E;
Publicação
OCEANS 2021: SAN DIEGO - PORTO
Abstract
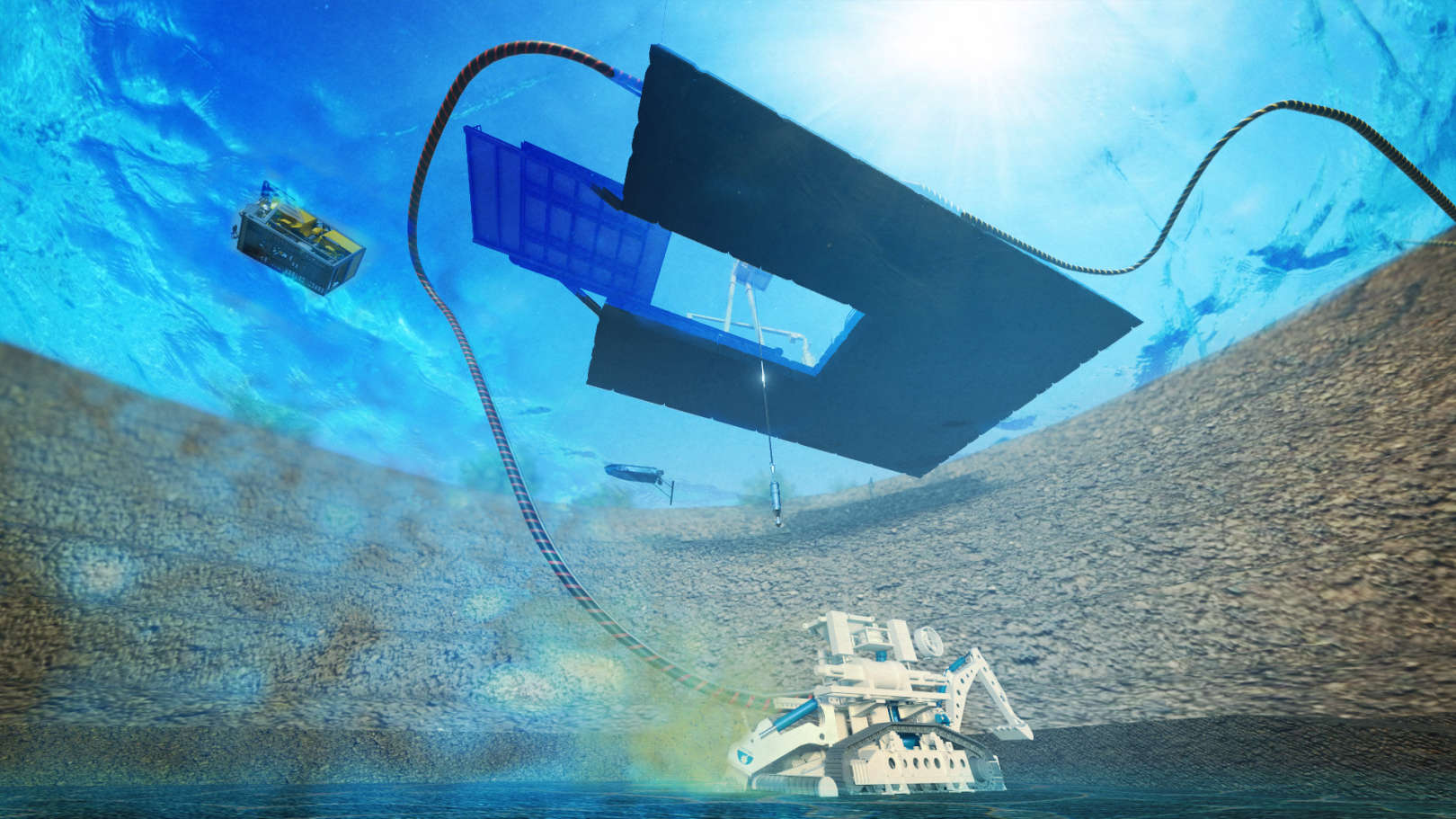
This paper presents the development of a hyperbaric system able to collect, transport and maintain deep-sea species in controlled condition from the sea floor up to the surface (HiperSea System). The system is composed by two chambers coupled with a transference set-up. The first chamber is able to reach a maximum of 1km depth collecting both benthic and pelagic deep-sea species. The second chamber is a life support compartment to maintain the specimens alive at the surface, in hyperbaric conditions.
2020
Autores
Martins, A; Almeida, C; Lima, P; Viegas, D; Silva, J; Almeida, JM; Almeida, C; Ramos, S; Silva, E;
Publicação
GLOBAL OCEANS 2020: SINGAPORE - U.S. GULF COAST
Abstract
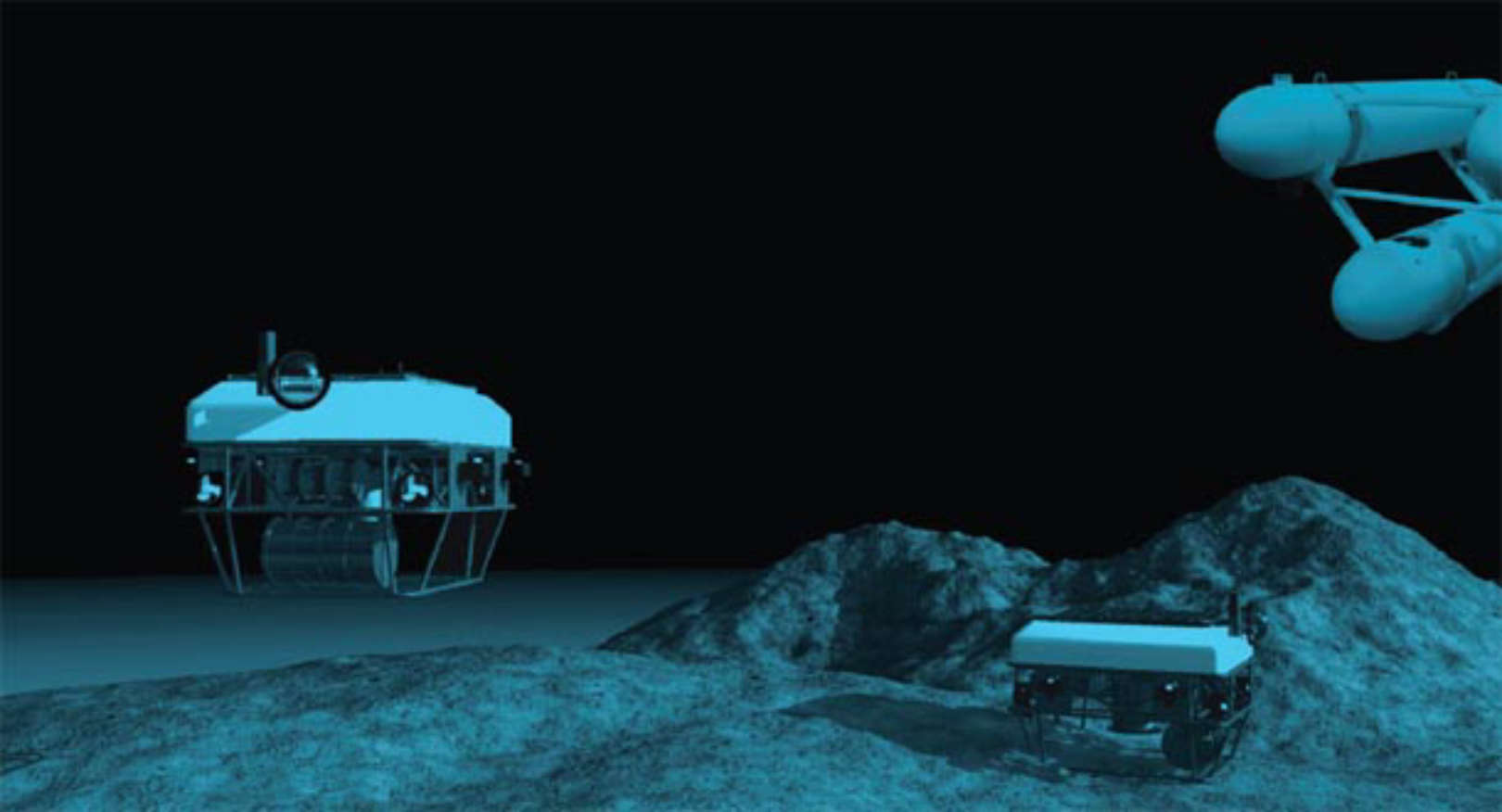
This paper presents an autonomous robotic system, IRIS, designed for lost fishing gear recovery. The vehicle was developed in the context of the NetTag project. This is a European Union project funded by EASME the Executive Agency for Small and Medium Enterprises addressing marine litter, and the reduction of quantity and impact of lost fishing gears in the ocean. NetTag intends to produce new technological devices for location and recovery of fishing gear and educational material about marine litter, raise awareness of fisheries industry and other stakeholders about the urgent need to combat marine litter and increase scientific knowledge on marine litter problematic, guaranteeing the engagement of fishers to adopt better practices to reduce and prevent marine litter derived from fisheries. The design of IRIS is presented in detail, addressing the mechanical design, hardware architecture, sensor system and navigation and control. Preliminary tests in tank and in controlled sea conditions are presented and ongoing developments on the recovery system are discussed.
The access to the final selection minute is only available to applicants.
Please check the confirmation e-mail of your application to obtain the access code.